
Automated vehicles are increasingly part of our society, in the forms of cars, taxi-copters and lawn-mowing robots. All of these must get from A to B while navigating maps and avoiding obstacles. They have a wide range of sensors to help them, from GPS positioning and magnetic compass orientation to proximity detectors, cameras, accelerometers and gyros, and must control motors and servos in order to move and react to their environment.
These robots, therefore, must perform multiple tasks at once, taking input from sensors and controlling actuators, all while responding to instructions from humans and preventing accidents. They can’t afford to do one task at a time – unless it is a very quick task. Imagine if a car’s attention were dedicated entirely to making an indicator blink:
- light on
- do nothing for one second
- light off
- do nothing for one second
- & repeat – goto Step 1…
A second is a very long time for a computer. Even ‘slow’ devices like an Arduino Uno can do millions of calculations per second. The above indicator sequence should really be:
- light on
- do something else for one second
- light off
- do something else for one second
- & repeat – goto Step 1…
Perhaps there’s nothing else to do but twiddle thumbs, but better to sit and keep watch than set the alarm and go to sleep.
RTSim is a Matlab or Python simulation of an Arduino-controlled robot. The robot is circular with diameter 0.4m, and has two independently controlled bidirectional wheels. It is equipped with GPS, a compass, and a sonar (ping!) device that can detect obstacles up to 1m away. The sonar can be orientated at any angle relative to the robot, but needs at least 0.1s between pings.
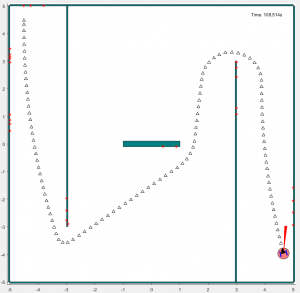
Here the robot follows a predefined path without intelligence.
Matlab
The latest sources are available at Github.
As with the Arduino, setup() runs once at the beginning, and then loop() is run repeatedly (until the robot reaches its destination). To start the simulation, just type the following in the Matlab command window:
RTRobot(30);
where the ‘30’ (or whatever) is how long you want the simulation to last.
The methods available for controlling the robot are:
- obj.new_position ();
- Sets a random initial position; use this in setup().
- target = obj.new_target ();
- Sets (and returns) a random target to aim for; use this in setup().
- target = obj.get_target ();
- Returns the current target to aim for.
- obj.reset_boundaries ();
- Generate map for seed (any positive integer) with random initial and target positions; use this in setup().
- time_us = obj.micros ();
- Microseconds since program started.
- time_ms = obj.millis ();
- Milliseconds since program started.
- obj.set_wheel_speeds (left, right);
- Set left and right wheel speeds (-127..127).
- obj.set_ping_angle (angle);
- Set angle (0..359) of sonar sensor.
- obj.ping_send ();
- Send a ping; the sonar takes 40ms to respond, but 100ms before another ping can be sent.
- position = obj.get_GPS ();
- The current position; updates once a second.
- orientation = obj.get_compass ();
- The orientation [degrees]; updates once a second.
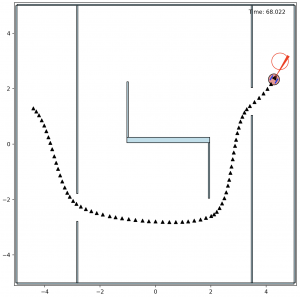
A solution based on a number of intermediate target points and orientations, using GPS and compass only.
Python
The following two files should be in your Python working folder:
- RTSim.py – do not edit this.
- RTRobot.py – edit this.
When you start the Python application and command window (e.g., IDLE, or IDLEX if you have it), you will need to set the working directory:
import os
os.chdir('H:\\Python')
As with the Arduino, setup() runs once at the beginning, and then loop() is run repeatedly (until the robot reaches its destination). To start the simulation, just type the following in the Python command window:
from RTRobot import RTRobot
RTRobot(30)
where the ’30’ (or whatever) is how long you want the simulation to last.
The methods available for controlling the robot are:
- self.new_position()
- Sets a random initial position; use this in setup().
- target = self.new_target()
- Sets (and returns) a random target to aim for; use this in setup().
- target = self.get_target()
- Returns the current target to aim for.
- self.reset_boundaries()
- Generate map for seed (any positive integer) with random initial and target positions; use this in setup().
- time_us = self.micros()
- Microseconds since program started.
- time_ms = self.millis()
- Milliseconds since program started.
- self.set_wheel_speeds(left, right)
- Set left and right wheel speeds (-127..127).
- self.set_ping_angle(angle)
- Set angle (0..359) of sonar sensor.
- self.ping_send()
- Send a ping; the sonar takes 40ms to respond, but 100ms before another ping can be sent.
- position = self.get_GPS()
- The current position; updates once a second.
- orientation = self.get_compass()
- The orientation [degrees]; updates once a second.